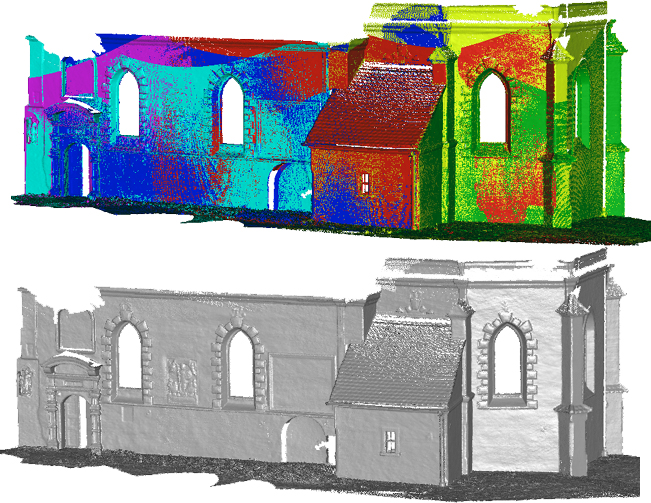
LS3D (Least Squares 3D Surface Matching) is a surface and point cloud co-registration software for data alignment, change detection and quality inspection/assessment
- The LS3D estimates the transformation parameters of one or more
surfaces or point clouds with respect to a template surface, using the
Generalized Gauss-Markov model, minimizing the sum of squares of the
Euclidean distances between the surfaces. This formulation gives the
opportunity of matching arbitrarily oriented 3D surfaces simultaneously,
without using explicit tie points. It provides mechanisms for internal
quality control and the capability of matching of data sets in different
resolution and quality.
The basic functions are:
- project management
- import of many point cloud formats
- unlimited view of 3D point clouds as range images
- co-registration
- multi-resolution and multi-quality processing
- advanced statistical tools
- comparison, quality assessment and change detection.
LS3D can also be used for the accuracy assessment of DSMs. For example, the SRTM C-Band DEMs was compared to a reference DEM from optical satellite imagery with known quality and production details. The figure on the right shows the frequency distributions of the spatial (distance) discrepancies after the LS3D software co-registration.The package was originally developed on R&D projects at ETH Zurich and has proven its quality and performance in many projects.
Download the brochure in pdf format